1. Giriş
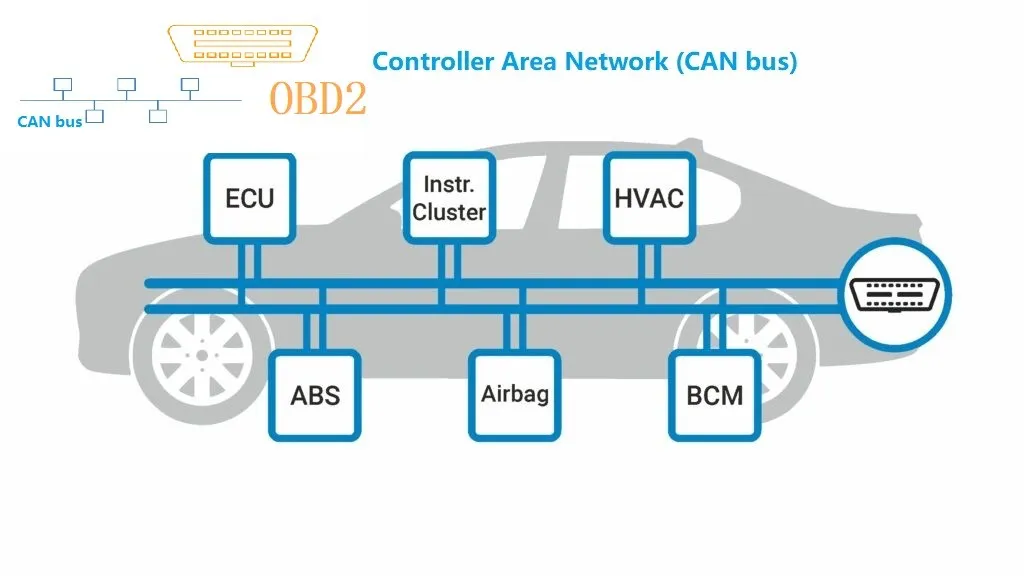
Günümüz araçları, yalnızca mekanik sistemlerden oluşmamakta; aynı zamanda birçok elektronik bileşenin bir arada çalıştığı kompleks yapılar haline gelmiştir. Bu elektronik bileşenlerin birbiriyle koordineli şekilde çalışabilmesi, ancak etkin bir haberleşme altyapısıyla mümkündür. Bu noktada, Controller Area Network (CAN Bus) adı verilen haberleşme protokolü, modern araç mimarilerinin vazgeçilmez bir unsuru haline gelmiştir.
CAN protokolü, Bosch firması tarafından 1980’li yıllarda geliştirilmiştir. İlk olarak 1991 yılında Mercedes-Benz firması tarafından ticari kullanıma sunulmuştur. Teknolojinin ana olanı, merkezi bir bilgisayar sistemine gereksinim duymadan, araç içinde bulunan mikrodenetleyiciler (ECU – Electronic Control Unit) arasında düşük maliyetli veri alışverişi sağlamaktır.
2. CAN Bus Sisteminin Temel Yapısı ve Çalışma Prensibi
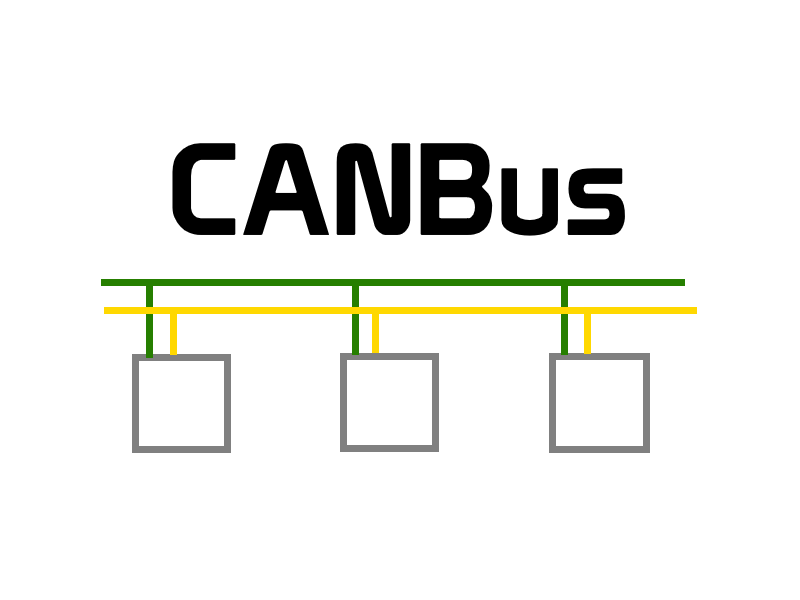
CAN Bus, çok noktalı (multi-master) ve mesaj tabanlı bir haberleşme protokolüdür. Veri iletimi, bus topolojisi adı verilen bir yapı üzerinden yapılır. Bu yapıda, tüm cihazlar ortak bir veri hattına bağlanır ve aynı veri kanalı dinlenir. Her bir cihaz yalnızca kendisini ilgilendiren mesajları işler.
CAN protokolünde tüm mesajlar, benzersiz bir kimlik numarası (ID) içermektedir. Bu ID, aynı zamanda mesajın önceliğini de belirler. Protokol, CSMA/CA (Carrier Sense Multiple Access with Collision Avoidance) yöntemini kullanarak aynı anda veri göndermeye çalışan cihazlar arasında çakışmayı önler. Daha düşük ID’ye sahip mesaj, daha yüksek önceliğe sahip olarak iletilir.
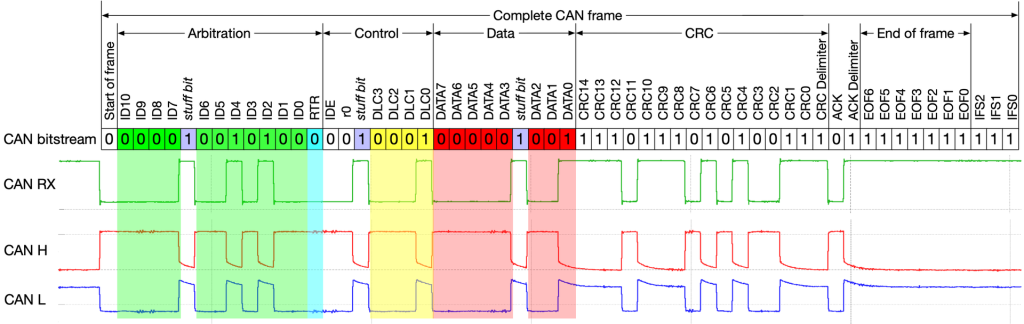
Mesaj formatı bu temel bileşenlerden oluşmaktadır:
- Başlık (Identifier – ID)
- Kontrol alanı (Data Length Code)
- Veri alanı (Data Field – max 8 byte)
- Hata denetimi bölgesi (CRC)
- Bit aralıkları (Intermission ve ACK)
3. Kullanım Alanları
CAN Bus sistemi öncelikle otomotiv sektörüne has yapılandırılmış olmasına rağmen, bugün çok farklı endüstriyel uygulamalarda yaygındır. Bunlara şu örnekler şu şekilde verilebilir:
- Binek ve ticari araçlar
- Endüstriyel otomasyon sistemleri
- Tarım makineleri
- Tıbbi cihazlar
- Demiryolu ve metro sistemleri
- Havacılık ve uzay teknolojileri
Özellikle gerçek zamanlı veri transferi, yüksek güvenilirlik ve düşük donanım maliyeti gibi avantajları, CAN protokolünü birçok uygulama için uygun hale getirmiştir.
4. Avantajlar ve Teknik Üstünlükler
CAN Bus sisteminin sağladığı ana avantajlar şu şekilde sıralanabilir:
- Kablolama maliyetlerinde azalma: Tüm bileşenlerin ortak bir veri hattına bağlanması, karmaşık kablolama ihtiyacını ortadan kaldırır.
- Hata toleransı: Elektromanyetik dalgalanmalara karşı dirençlidir ve hata algılama mekanizmaları içerir.
- Gerçek zamanlı iletişim: Kritik görevlerin zamanında gerçekleştirilmesine olanak tanır.
- Modülerlik: Sisteme yeni cihazlar kolaylıkla entegre edilebilir.
- Merkezi kontrolcü gerektirmemesi: Her cihaz bağımsız olarak veri gönderip alabilir.
5. Güvenlik ve Sınırlılıklar
CAN Bus sistemleri tasarlandıkları dönemde siber güvenlik önceliği taşımamaktaydı. Bu nedenle, modern güvenlik kriterleri açısından bazı zayıf yönleri bulunmaktadır:
- Kimlik doğrulama (authentication) mekanizması bulunmaz.
- Veri şifreleme (encryption) desteği yoktur.
- Fiziksel erişim sağlanması durumunda sistem manipüle edilebilir.
Bu zafiyetler, özellikle siber güvenlik alanında çalışan uzmanlar için önemli bir araştırma alanı oluşturmaktadır. Araç içi sistemlerin siber saldırılara karşı korunması amacıyla CAN trafiğinin izlenmesi ve analiz edilmesi için çeşitli güvenlik çözümleri geliştirilmektedir.
Güvenlik Açıklarının Giderilmesine Yönelik Modern Yaklaşımlar
CAN Bus protokolü tasarlandığında güvenlik, öncelikli bir konu değildi. Ancak otonom ve bağlı araç teknolojilerinin gelişmesiyle birlikte, CAN tabanlı sistemlerin güvenliğini artırmaya yönelik çeşitli çözüm yolları geliştirilmiştir. Bu çözümler hem yazılımsal hem de donanımsal düzeyde uygulanmaktadır:
CAN Filtreleme ve Trafik İzleme Sistemleri (Intrusion Detection Systems – IDS)
Araç içi ağ trafiği sürekli olarak izlenir ve normal dışı (anormal) davranışlar tespit edilmeye çalışılır. Bu sistemler genellikle:
- İstatistiksel analiz
- Anomali tespiti
- Makine öğrenmesi yöntemleri
gibi teknikler kullanarak çalışır. Böylece ECU’lar arası şüpheli veri paketleri belirlenebilir.
Donanımsal Güvenlik Modülleri
Yeni nesil araçlarda, güvenli veri işleme ve anahtar yönetimi için özel donanım tabanlı güvenlik modülleri (Hardware Security Module – HSM) entegre edilmektedir. Bu modüller sayesinde:
- Dijital imzalama
- Kriptografik işlem hızlandırma
- Güvenli önyükleme
gibi işlemler daha güvenilir hale gelir.
Veri İmzalama ve Mesaj Kimlik Doğrulama
Standart CAN protokolünde kimlik doğrulama yer almaz. Bu eksikliği gidermek için bazı üreticiler, mesaj seviyesinde dijital imzalama uygulamaya başlamıştır. Örneğin, her mesajın sonuna HMAC (Hash-based Message Authentication Code) eklenerek mesajın kaynağı doğrulanır.
Ağ Bölümleme ve Zonlama
Tüm sistemin tek bir CAN hattında çalışması, saldırgan için geniş bir hareket alanı oluşturur. Bu nedenle, modern araçlarda ağ bölümlendirme (network segmentation) yapılarak:
- Güvenli ve güvensiz bölgeler ayrılır
- Kritik sistemler izole edilir
- Saldırı etkisi sınırlanır
CAN FD ve Güvenli Alternatif Protokoller
CAN FD gibi gelişmiş versiyonlar, güvenlik için daha fazla alan (payload) sağladığından dolayı şifreleme ve imzalama gibi işlemlere daha uygun hale gelmiştir. Ayrıca Automotive Ethernet gibi yeni protokoller, yerleşik güvenlik protokolleri (örneğin MACsec) ile birlikte gelmektedir.Güvenlik için daha fazla alan (payload) sağladığından dolayı şifreleme ve imzalama gibi işlemlere daha uygun hale gelmiştir. Ayrıca Automotive Ethernet gibi yeni protokoller, yerleşik güvenlik protokolleri (örneğin MACsec) ile birlikte gelmektedir.
6. Geleceğe Yönelik Gelişmeler
CAN Bus teknolojisi uzun süredir kullanılmakta olan olgun bir protokol olmasına rağmen, modern araçların veri iletim ihtiyaçlarının artmasıyla birlikte bazı genişletilmiş sürümleri ve alternatif protokoller geliştirilmektedir. Özellikle CAN FD (Flexible Data Rate), daha yüksek bant genişliği ve veri uzunluğu sunarak bu ihtiyacı karşılamaya yöneliktir.
Buna ek olarak, yüksek veri iletimi gereken sistemlerde Automotive Ethernet gibi alternatif haberleşme sistemleri de gelişim göstermektedir. Ancak tüm bu gelişmelere rağmen, CAN Bus protokolü düşük maliyetli ve yüksek güvenilirliğe sahip yapısı nedeniyle uzun bir süre daha kullanılmaya devam edecektir.
| Özellik | CAN | CAN FD | Automotive Ethernet |
| Maksimum Veri Hızı | 1 Mbps | 5–8 Mbps | 100 Mbps – 1 Gbps |
| Maksimum Veri Uzunluğu | 8 byte | 64 byte | 1500 byte ve üzeri |
| Gerçek Zamanlılık | Evet | Evet | Sınırlı (QoS ile mümkün) |
| Karmaşıklık | Düşük | Orta | Yüksek |
| Maliyet | Düşük | Orta | Yüksek |
| Kullanım Alanı | Tüm araçlarda | Yeni nesil araç platformları | ADAS, infotainment sistemleri |
| Güvenlik Özellikleri | Yok | Kısıtlı | Gelişmiş (MACSec, VLAN vb.) |
7. Sonuç
CAN Bus teknolojisi, otomotiv başta olmak üzere birçok sektörde elektronik sistemlerin verimli bir şekilde haberleşmesini sağlayan temel bir altyapı çözümüdür. Basitliği, güvenilirliği ve esnekliği sayesinde endüstrideki yerini korumaktadır. Ancak güvenlik eksiklikleri göz önüne alındığında, gelecekte bu sistemlerin daha güvenli ve yüksek hızlı protokollerle desteklenmesi kaçınılmazdır. Bilgisayar mühendisliği ve siber güvenlik alanlarında çalışan araştırmacılar için CAN Bus sistemleri, hem uygulamalı hem de teorik olarak zengin bir çalışma alanı sunmaktadır.
Bu doğrultuda, Refons teknoloji olarak özellikle otomotiv sektöründeki CAN Bus projelerine yönelik olarak; sistem analizi, prototipleme, güvenlik testleri ve gömülü yazılım geliştirme alanlarında danışmanlık ve yazılım çözümleri sunmaktayız. Kurumunuza özel ihtiyaçları anlayarak, sahada karşılaşılan pratik sorunlara yönelik ölçeklenebilir ve etkin çözümler üretmekteyiz. İlgili projelerinizde birlikte çalışmak ve katkı sağlamak için bizimle iletişime geçebilirsiniz.
📚 Kaynakça
- Bosch. (1991). CAN Specification Version 2.0. Robert Bosch GmbH.
- ISO 11898-1:2015. Road vehicles – Controller area network (CAN) – Part 1: Data link layer and physical signalling.
- Navet, N., Song, Y.-Q., Simonot-Lion, F., & Wilwert, C. (2005). Trends in automotive communication systems. Proceedings of the IEEE, 93(6), 1204–1223.
- Ziermann, T., Wildermann, S., & Teich, J. (2012). CAN vs. Ethernet: A performance comparison of in-vehicle network architectures. Proceedings of DATE 2012.
- python-can documentation: https://python-can.readthedocs.io/
YUNUS EMRE ÇETİNKAYA
https://www.linkedin.com/in/yunus-emre-%C3%A7etinkaya-88a0b7218
20.05.2025